




Real-time disparity estimation running on embedded Xilinx Zynq Ultrascale+
In order to improve usability and safety, modern unmanned aerial vehicles (UAVs) are equipped with sensors to monitor the environment, such as laser-scanners and cameras. One important aspect in this monitoring process is to detect

University of Glasgow joins the advisory board
Welcome to the advisory board, University of Glasgow University Avenue, Glasgow G12 8QQ www.gla.ac.uk

Motion Impossible joins the advisory board
Welcome to the advisory board, Motion Impossible Unit 12 Brunel Court, Dean Road, Yate, Bristol. BS37 5NR +44 1454 501 010 info@motion-impossible.com motion-impossible.com
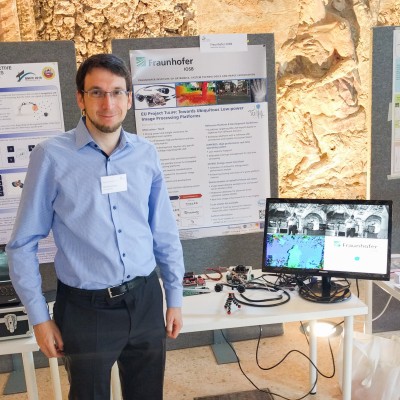
TULIPP Demo at EMVA Forum 2018
Fraunhofer demo TULIPP hardware at the European Machine Vision Association Forum, 5th - 7th September 2018, Bologna, Italy. The demo here has a dual/stereo camera setup. This solution weighs less than a depth sensor, is
TULIPP at the EMVA Forum in Bologna
On Thursday September 6th, Fraunhofer IOSB will present TULIPP at the 3rd EMVA Forum in Bologna. We will show a live demo of real-time stereo processing on the EMC2-DP board equipped with a Xilinx Ultrascale+

TULIPP Agri starter kit
AI is destined to be the future of agriculture but there are significant challenges involved, the TULIPP Agri Kit will help you productively develop safe, reliable, intelligent and efficient robots by providing: Certifiable hard real

University of Leicester joins the advisory board
Welcome to the advisory board, University of Leicester 7-9 Salisbury Road Leicester Leicestershire LE1 7QR United Kingdom www.le.ac.uk/innovation Tel. +44 1162 522 185
First public release of the TULIPP toolchain STHEM
The first version of the TULIPP tool-chain is now available to the public. The TULIPP toolchain is called STHEM - an acronym for Supporting uTilities for Heterogeneous EMbedded image processing platforms. The key feature of STHEM
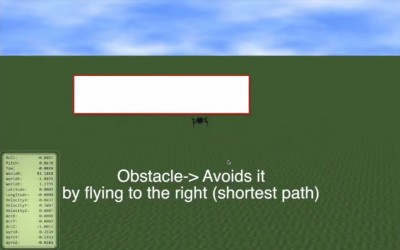
TULIPP obstacle avoidance based on embedded stereo for UAVs
The performance of the reactive obstacle avoidance was tested on real objects in a hardware in the loop (HIL) setup. In our approach the disparity image is calculated on Xilinx Ultrascale+ FPGA and transformed into
Erle Robotics joins the advisory board
Welcome to the advisory board, Erle Robotics Calle Venta de la Estrella, 6 Pab. 130, 01006 Vitoria, Álava, Spain http://erlerobotics.com Tel. 0034 945 30 68 20