






Download a PDF version of the TULIPP book NOW!

Project partners
- THALES (France) Coordinator
- RUHR-UNIVERSITAT BOCHUM (Germany)
- SUNDANCE MULTIPROCESSOR TECHNOLOGY LTD (United Kingdom)
- HIPPEROS SA (Belgium)
- FRAUNHOFER GESELLSCHAFT ZUR FORDERUNG DER ANGEWANDTEN FORSCHUNG EV (Germany)
- NORGES TEKNISK-NATURVITENSKAPELIGE UNIVERSITET NTNU (Norway)
- Synective Labs AB (Sweden)
- EFFICIENT INNOVATION SAS (France)
Project information
START DATE: 09 February 2016
DURATION: 3 years
EC CONTRIBUTION: 3’897’055 euro
COORDINATOR: Dr Philippe MILLET
Objectives
- Define a reference platform for low power image processing applications.
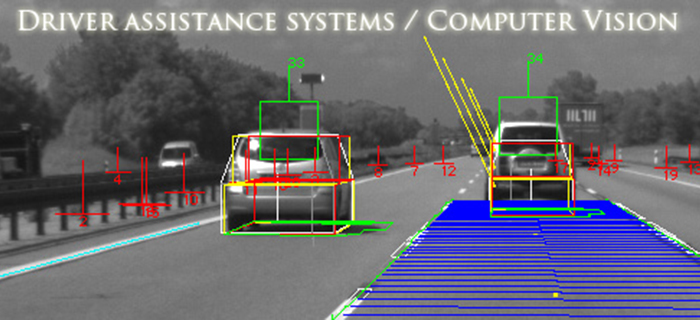
- Reference platform instantiation through use applications (Medical imaging, Robotics imaging, Automotive).
- Demonstrate and plan improvements of defined key performance indicators.
- Start-up and manage an ecosystem of stakeholder to extend image processing norms.







