




Real-time disparity estimation running on embedded Xilinx Zynq Ultrascale+
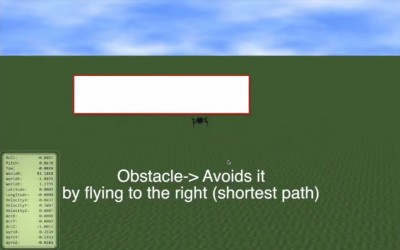
In order to improve usability and safety, modern unmanned aerial vehicles (UAVs) are equipped with sensors to monitor the environment, such as laser-scanners and cameras. One important aspect in this monitoring process is to detect obstacles in the flight path in order to avoid collisions. Since a large number of consumer UAVs suffer from tight